纽路麦卡(Neuromeka)
纽路麦卡(Neuromeka)公司创立于2013年,一直致力于通过安全易用的低价型协作机器人引领中小企业生产线的自动化。纽路麦卡(Neuromeka)公司协作机器人产品可充分保障作业人员的安全,可应用于上下料,组装,打磨,注塑成型等各种工业领域。纽路麦卡(Neuromeka)正在构建即使在无专业机器人技术人员的中小制造型企业,也可以毫无负担地使用机器人技术的协作机器人中心RaaS(Robot as a Service)平台服务生态系统,并通过分享所积累的机器人技术,致力于帮助客户实现生产力的向上。
公司沿革:
2018 12 启动IndyGo示范事业
-12 推出STEP3
-12 获得KDB(Korea Development Bank, 韩国产业银行) NextRound青蛙奖
-12 获得2018年韩国年度机器人企业奖(产业用机器人领域)
-09 Indy7获得红点设计奖(Red dot Awards)
-07 推出Delta机器人产品线D
-07 启动系统业务
-06 越南胡志明市V-SCRC分公司启动
2017 12 获得2017年韩国年度机器人企业奖(产业用机器人领域)
-09 推出Indy7
-03 推出Indy3/5/10
2016 10 推出Indy-RP
-07 推出STEP2
2015 08 推出IGoT/WSN
-07 推出Conty App
2014 12 推出STEP/iMX, STEP/HPC
-10 推出IGoT/HUB
-09 推出STEP/PC, STEP/BBB
2013 10 推出NRMKPlatform SDK
-07 推出NRMKFoundation SDK
联系我们
地 址:15F, W, 7, Yeonmujang 5ga-gil, Seongdong-gu, Seoul, Republic of Korea
联 系 人:运营部门 安基托常务
联系方式:
手机:+82-010-6411-1073
电话:+82-070-4791-3103
传真:070-4032-3327
邮箱:kitak.ahn@neuromeka.com
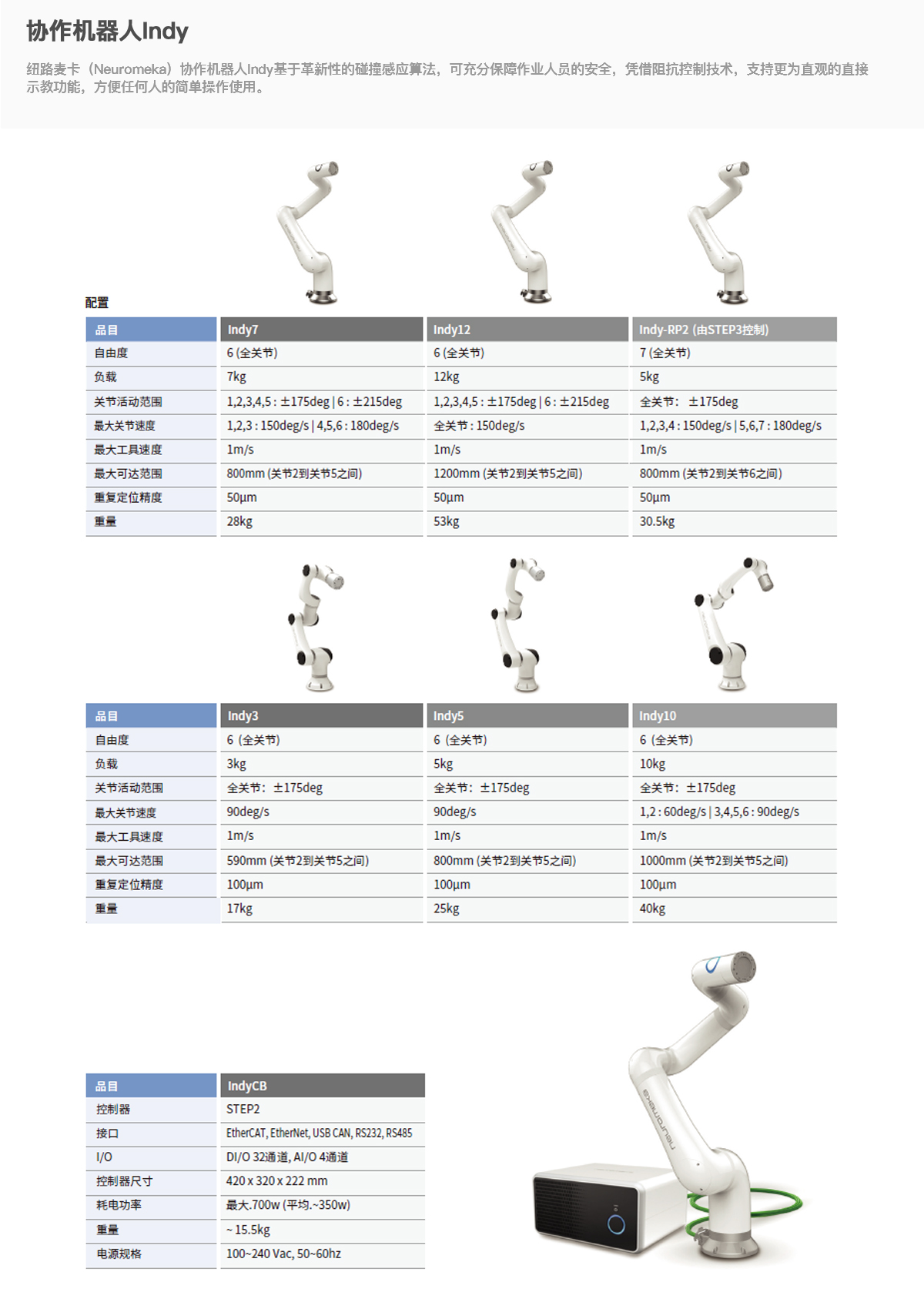
企业产品: